服務熱線
400-9655-321
- 華數首頁
- 機器人產品中心
- BR雙旋機器人係列
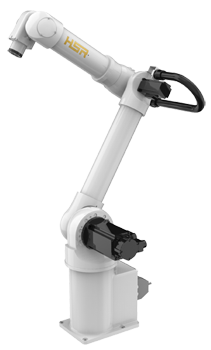
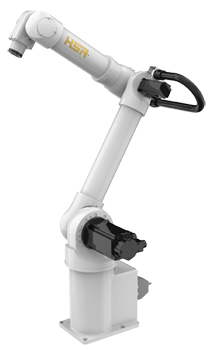
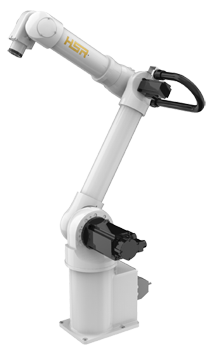
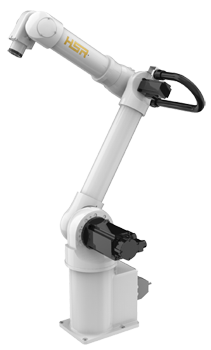
- JR六軸機器人係列
- HSR-JR603-570工業機器人
- HSR-JR605-750係列工業機器人
- HSR-JR607-910工業機器人
- HSR-JR612-1600工業機器人
- HSR-JR612-1600/DM工業機器人
- HSR-JR618-2000光伏機器人
- HSR-JR620-1700工業機器人
- HSR-JR630-1800工業機器人
- HSR-JR650-2400工業機器人
- HSR-JR680-2200工業機器人
- HSR-JR6150-2800工業機器人
- HSR-JR6210工業機器人
- HSR-JR607-730 工業機器人
- HSR-JR6210L
- HSR-JR6210F
- HSR-JR6300-3000
- HSR-JR6360-2700
- JH焊接機器人係列
- HC衝壓機器人係列
- MD碼垛衝壓機器人係列
- scara機器人係列
- PCB專用機器人係列
- 工業協作機器人係列
- 協作機器人係列
- 教育產品係列
- 核心零部件
- 工業軟件
- 解決方案
- 集成商服務
- 下載中心
- 關於華數
- 新聞資訊

![[V1.6.10]華數機器人操作與編程說明書v0.2.2.zip](./db_picture/pro5/202012161102525900.jpg)